|
|
ビクター |
ダイソー |
|
電源 |
00 |
00 |
|
チャンネル up |
9a |
9a |
|
チャンネル down |
5a |
5a |
|
音量 up |
90 |
90 |
|
音量 down |
50 |
50 |
---------------------------------------------------------------------------------------
プログラムなど公開します。
新しいページがあります。ここにはないです。
変更するかもしれないので一時配布は停止しています。
試してみたい方は、注意事項を確認の上メールをください。
★注意事項
1
公開データを使用しての
使用時のすべての不具合・その他の機器の破損(影響)・人への被害・発火炎上などの
被害に遭われても一切保証・クレームなどの処理は行えません。
各自で責任を持って使用してください。
★注意事項
2
再配布・改造後の再配布・データ(回路図など)のコピーは、
商用もしくは手間賃を除く金額の受け取りなどを行わなければご自由に。
ただし、ソースリストも同時に配布し、コメント(改造追加・入手経路など)を記入してください。
連絡は一切必要有りません。プログラム内容の質問にもお答えできません。(そこまで詳しくないため)
インターネット上でキット(完成品)配布などの組み込み使用はご遠慮ください。
★注意事項
3
MPLAB・CCSC・ライターなどPICのプログラム環境をお持ちで、ご自分でバグ発生時の対応
改造がおこなえる方でないと使用できません。場合によりオシロスコープも必要かも。
..
後閑哲也様のC言語によるPICプログラム入門と言う本を購入し、上記ツールをそろえて
16F877を使いデバッグ(232Cでコメントを出力する)すれば何となくわかると思います。
全部そろえても高級アンプ1台分にはならないと思います。オシロは高いのもあるが。
---------------------------------------------------------------------------------------
図面。各自でおかしいところは直してください。
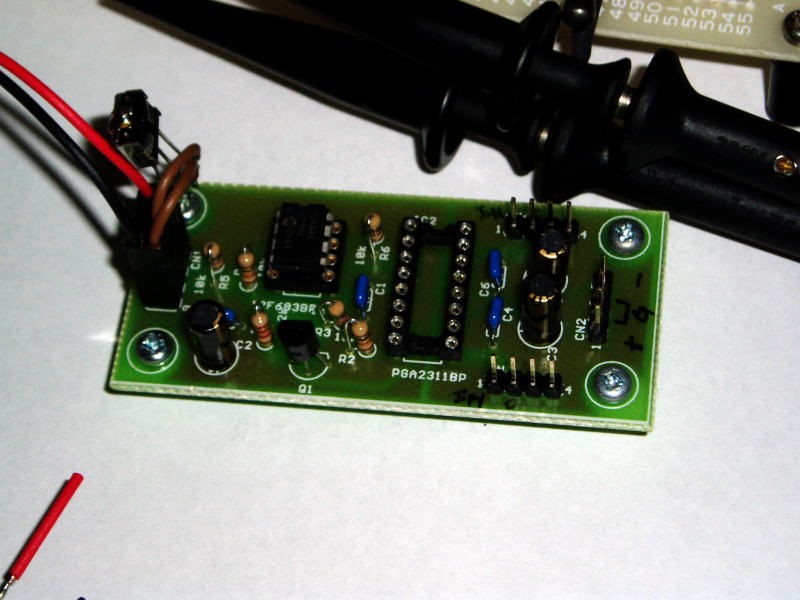
12F683
12F675タイプ。←クリック。12F683は別ページに掲載。
2009/05/26
16F88タイプ。←クリック。現在は新しく12F683で↑クリックしたところにあります。
16F877タイプ。←クリック。現在は新しく12F683で↑クリックしたところにあります。
下のページは参考です。自分の覚え書き。
部品の配布予定のページを作りました。
←クリックするとページに飛びます。
本文中に書いていますが、
ぼったくり価格じゃん。イラネ。と思われる方は・・
16F88と16F877は公開しているものを使ってください。。
使用したもののバージョンは
CCSC
Ver3.222 MPLAB V7.52
一応最終?
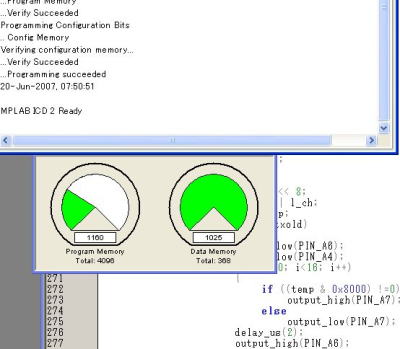
左12F675の容量。右は同16F88。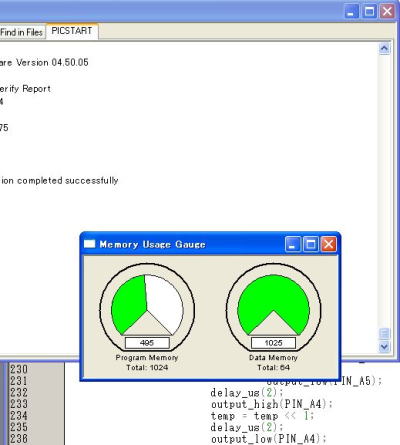
ダイ○ーで、リモコンを買ってきました。
問題なく使用できました。でも、設定方法がビミョー。
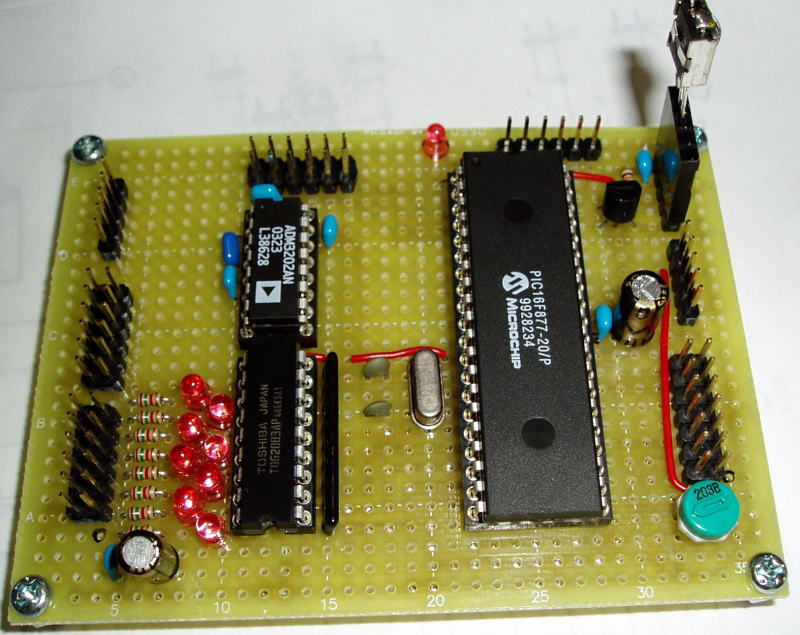
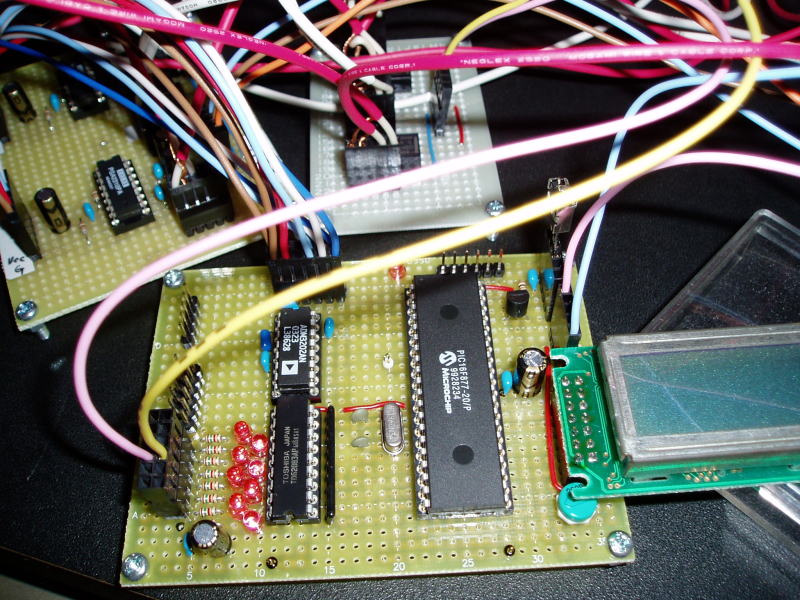
常用(ずっとテスト中の)16F88バージョンです。
フロント用とリア用にPGA2310を計2ヶ積んでいます。
リモコンは、以前に書いたもので確認。
右:Victor RM-A800
左:OHM 型式? 
12F683のものです。
R・L
2チャンネルです。
16F877にLCDを付けてdb表示。(このあたりは前のまま)
232Cでデバッグ用の情報を送信しています。
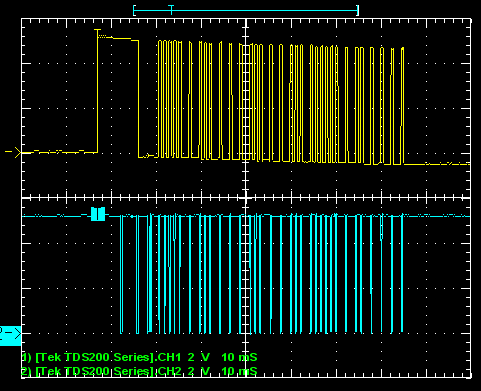
16F877のプログラムを入れると以下のものが232Cポートより送られてきます。
シリアルポートからのデータは・・
90
--- ボリュームアップ
50 ---
ボリュームダウン
repert --- 繰り返しのコード受信
noise --- 結構?受信する外乱のパルス受信時
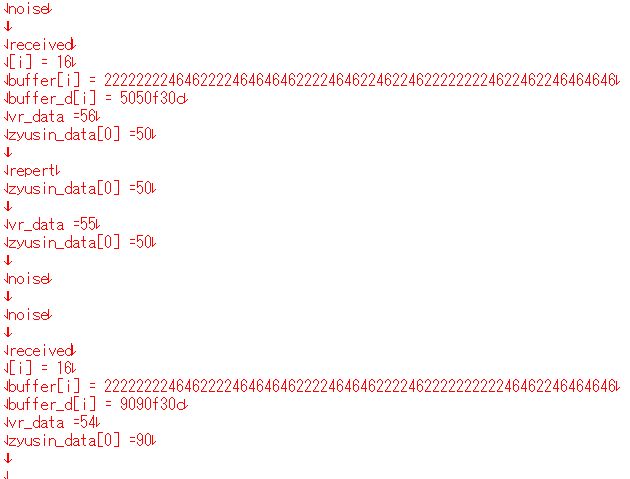
buffer[i]の"2222・・・・"が読み込んだタイマー値です。
buffer_d[i]は、先のデータを"0"or"1"に変換しています。
"0"は、ビット間が1.125ms。クロック4MHZ、プリスケーラ32だと
(1.125ms/0.25μSec
x4)/32 = 35。 16進だと 23
同じく、"1"はh、2.25ms
(2.25ms/0.25μSec
x4)/32 = 70。 16進だと 46
12F675以外はクロック8MHzですので、上記を置き換えれば同じ値になります。
クロック8MHZだと、プリスケーラ64。
buffer_d[i]は、先頭の"90""90"がコードです。反転したデータがきますがプログラム上で直しています。
次の"f3""0d"はカスタムコードというものです。これは反転していません。
zyusin_data[0]に受信したコードがあります。
ここのデータを各自でご利用ください。
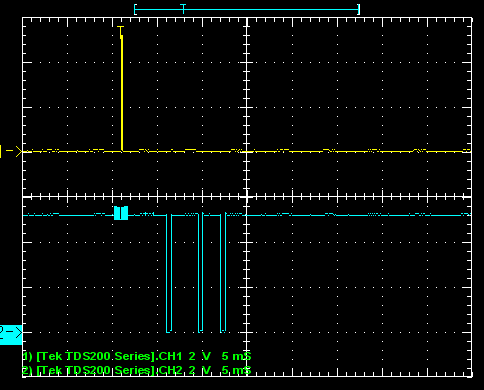
下の3枚目は外乱を受信したところですが、よくこの状態になります。
インバータ式の蛍光灯を受信部に近づけると連続できます。
リモコンのフォーマットは、↓が解りやすいです。
http://www.necel.com/ja/faq/mi_com/__com_remo.html
|
|
1枚目 |
|
|
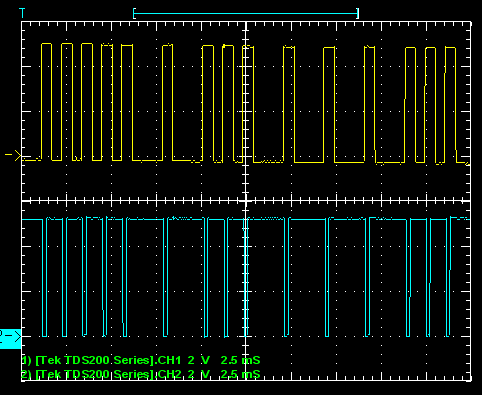
2枚目 |
|
|
3枚目 |